A stepper motor (or step motor) is a brushless, synchronous electric motor that can divide a full rotation into a large number of steps. The motor's position can be controlled precisely without any feedback mechanism (see Open-loop controller), as long as the motor is carefully sized to the application. Stepper motors are similar to switched reluctance motors (which are very large stepping motors with a reduced pole count, and generally are closed-loop commutated.)
Fundamentals of operation
Stepper motors operate differently from DC brush motors, which rotate when voltage is ![]() applied to their terminals. Stepper motors, on the other hand, effectively have multiple "toothed" electromagnets arranged around a central gear-shaped piece of iron. The electromagnets are energized by an external control circuit, such as a microcontroller. To make the motor shaft turn, first one electromagnet is given power, which makes the gear's teeth magnetically attracted to the electromagnet's teeth. When the gear's teeth are thus aligned to the first electromagnet, they are slightly offset from the next electromagnet. So when the next electromagnet is turned on and the first is turned off, the gear rotates slightly to align with the next one, and from there the process is repeated. Each of those slight rotations is called a "step", with an integer number of steps making a full rotation. In that way, the motor can be turned by a precise angle.
applied to their terminals. Stepper motors, on the other hand, effectively have multiple "toothed" electromagnets arranged around a central gear-shaped piece of iron. The electromagnets are energized by an external control circuit, such as a microcontroller. To make the motor shaft turn, first one electromagnet is given power, which makes the gear's teeth magnetically attracted to the electromagnet's teeth. When the gear's teeth are thus aligned to the first electromagnet, they are slightly offset from the next electromagnet. So when the next electromagnet is turned on and the first is turned off, the gear rotates slightly to align with the next one, and from there the process is repeated. Each of those slight rotations is called a "step", with an integer number of steps making a full rotation. In that way, the motor can be turned by a precise angle.
Stepper motor characteristics
1. Stepper motors are constant power devices.
2. As motor speed increases, torque decreases. (most motors exhibit maximum torque when stationary, however the torque of a motor when stationary 'holding torque' defines the ability of the motor to maintain a desired position while under external load).
3. The torque curve may be extended by using current limiting drivers and increasing the driving voltage (sometimes referred to as a 'chopper' circuit, there are several off the shelf driver chips capable of doing this in a simple manner).
4. Steppers exhibit more vibration than other motor types, as the discrete step tends to snap the rotor from one position to another (called a detent). The vibration makes stepper motors noisier than DC motors.
5. This vibration can become very bad at some speeds and can cause the motor to lose torque or lose direction. This is because the rotor is being held in a magnetic field which behaves like a spring. On each step the rotor overshoots and bounces back and forth, "ringing" at its resonant frequency. If the stepping frequency matches the resonant frequency then the ringing increases and the motor comes out of synchronism, resulting in positional error or a change in direction. At worst there is a total loss of control and holding torque so the motor is easily overcome by the load and spins almost freely.
6. The effect can be mitigated by accelerating quickly through the problem speeds range, physically damping (frictional damping) the system, or using a micro-stepping driver.
7. Motors with a greater number of phases also exhibit smoother operation than those with fewer phases (this can also be achieved through the use of a micro stepping drive)
Open-loop versus closed-loop commutation
Steppers are generally commutated open loop, i.e. the driver has no feedback on where the rotor actually is. Stepper motor systems must thus generally be over engineered, especially if the load inertia is high, or there is widely varying load, so that there is no possibility that the motor will lose steps. This has often caused the system designer to consider the trade-offs between a closely sized but expensive servomechanism system and an oversized but relatively cheap stepper.
A new development in stepper control is to incorporate a rotor position feedback (e.g. an encoder or resolver), so that the commutation can be made optimal for torque generation according to actual rotor position. This turns the stepper motor into a high pole count brushless servo motor, with exceptional low speed torque and position resolution. An advance on this technique is to normally run the motor in open loop mode, and only enter closed loop mode if the rotor position error becomes too large — this will allow the system to avoid hunting or oscillating, a common servo problem.
Types
There are three main types of stepper motors:[1]
1. Permanent Magnet Stepper (can be subdivided in to 'tin-can' and 'hybrid', tin-can being a cheaper product, and hybrid with higher quality bearings, smaller step angle, higher power density)
2. Hybrid Synchronous Stepper
3. Variable Reluctance Stepper
4. Lavet type stepping motor
Permanent magnet motors use a permanent magnet (PM) in the rotor and operate on the attraction or repulsion between the rotor PM and the stator electromagnets. Variable reluctance (VR) motors have a plain iron rotor and operate based on the principle that minimum reluctance occurs with minimum gap, hence the rotor points are attracted toward the stator magnet poles. Hybrid stepper motors are named because they use a combination of PM and VR techniques to achieve maximum power in a small package size.
Two-phase stepper motors
There are two basic winding arrangements for the electromagnetic coils in a two phase stepper motor: bipolar and unipolar.
Unipolar motors
A unipolar stepper motor has two windings per phase, one for each direction of magnetic field. Since in this arrangement a magnetic pole can be reversed without switching the direction of current, the commutation circuit can be made very simple (eg. a single transistor) for each winding. Typically, given a phase, one end of each winding is made commo n: giving three leads per phase and six leads for a typical two phase motor. Often, these two phase commons are internally joined, so the motor has only five leads.
n: giving three leads per phase and six leads for a typical two phase motor. Often, these two phase commons are internally joined, so the motor has only five leads.
A microcontroller or stepper motor controller can be used to activate the drive transistors in the right order, and this ease of operation makes unipolar motors popular with hobbyists; they are probably the cheapest way to get precise angular movements.
Unipolar stepper motor coils
(For the experimenter, one way to distinguish common wire from a coil-end wire is by measuring the resistance. Resistance between common wire and coil-end wire is always half of what it is between coil-end and coil-end wires. This is because there is twice the length of coil between the ends and only half from center (common wire) to the end.) A quick way to determine if the stepper motor is working is to short circuit every two pairs and try turning the shaft, whenever a higher than normal resistance is felt, it indicates that the circuit to the particular winding is closed and that the phase is working.
Bipolar motor
Bipolar motors have a single winding per phase. The current in a winding needs to be reversed in order to reverse a magnetic pole, so the driving circuit must be more complicated, typically with an H-bridge arrangement (however there are several off the shelf driver chips available to make this a simple affair). There are two leads per phase, none are common.
Static friction effects using an H-bridge have been observed with certain drive topologies[citation needed].
Because windings are better utilized, they are more powerful than a unipolar motor of the same weight. This is due to the physical space occupied by the windings. A unipolar motor has twice the amount of wire in the same space, but only half used at any point in time, hence is 50% efficient (or approximately 70% of the torque output available). Though bipolar is more complicated to drive, the abundance of driver chip means this is much less difficult to achieve.
An 8-lead stepper is wound like a unipolar stepper, but the leads are not joined to common internally to the motor. This kind of motor can be wired in several configurations:
* Unipolar.
* Bipolar with series windings. This gives higher inductance but lower current per winding.
* Bipolar with parallel windings. This requires higher current but can perform better as the winding inductance is reduced.
* Bipolar with a single winding per phase. This method will run the motor on only half the available windings, which will reduce the available low speed torque but require less current.
Higher-phase count stepper motors
Multi-phase stepper motors with many phases tend to have much lower levels of vibration, although the cost of manufacture is higher. These motors tend to be called 'hybrid' and have more expensive machined parts, but also higher quality bearings. Though they are more expensive, they do have a higher power density and with the appropriate drive electronics are actually better suited to the application[citation needed], however price is always an important factor. Computer printers may use hybrid designs.
Stepper motor drive circuits
Stepper motor performance is strongly dependent on the drive circuit. Torque curves may be extended to greater speeds if the stator poles can be reversed more quickly, the limiting factor being the winding inductance. To overcome the inductance and switch the windings quickly, one must increase the drive voltage. This leads further to the necessity of limiting the current that these high voltages may otherwise induce.
L/R drive circuits
L/R drive circuits are also referred to as constant voltage drives because a constant positive or negative voltage is applied to each winding to set the step positions. However, it is winding current, not voltage that applies torque to the stepper motor shaft. The current I in each winding is related to the applied voltage V by the winding inductance L and the winding resistance R. The resistance R determines the maximum current according to Ohm's law I=V/R. The inductance L determines the maximum rate of change of the current in the winding according to the formula for an Inductor dI/dt = V/L. Thus when controlled by an L/R drive, the maximum speed of a stepper motor is limited by its inductance since at some speed, the voltage U will be changing faster than the current I can keep up. In simple terms the rate of change of current is L X R (e.g. a 10mH inductance with 2 ohms resistance will take 20 ms to reach approx 2/3rds of maximum torque or around 0.1 sec to reach 99% of max torque). To obtain high torque at high speeds requires a large drive voltage with a low resistance and low inductance. With an L/R drive it is possible to control a low voltage resistive motor with a higher voltage drive simply by adding an external resistor in series with each winding. This will waste power in the resistors, and generate heat. It is therefore considered a low performing option, albeit simple and cheap.
Chopper drive circuits
Chopper drive circuits are also referred to as constant current drives because they generate a somewhat constant current in each winding rather than applying a constant voltage. On each new step, a very high voltage is applied to the winding initially. This causes the current in the winding to rise quickly since dI/dt = V/L where V is very large. The current in each winding is monitored by the controller, usually by measuring the voltage across a small sense resistor in series with each winding. When the current exceeds a specified current limit, the voltage is turned off or "chopped", typically using power transistors. When the winding current drops below the specified limit, the voltage is turned on again. In this way, the current is held relatively constant for a particular step position. This requires additional electronics to sense winding currents, and control the switching, but it allows stepper motors to be driven with higher torque at higher speeds than L/R drives. Integrated electronics for this purpose are widely available.
Phase current waveforms
A stepper motor is a polyphase AC synchronous motor (see Theory below), and it is ideally driven by sinusoidal current. A full step waveform is a gross approximation of a sinusoid, and is the reason why the motor exhibits so much vibration. Various drive techni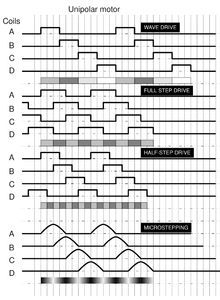 ques have been developed to better approximate a sinusoidal drive waveform: these are half stepping and microstepping.
ques have been developed to better approximate a sinusoidal drive waveform: these are half stepping and microstepping.
Full step drive (two phases on)
This is the usual method for full step driving the motor. Both phases are always on. The motor will have full rated torque.
Wave drive
In this drive method only a single phase is activated at a time. It has the same number of steps as the full step drive, but the motor will have significantly less than rated torque. It is rarely used.
Half stepping
When half stepping, the drive alternates between two phases on and a single phase on. This increases the angular resolution, but the motor also has less torque (approx 70%) at the half step position (where only a single phase is on). This may be mitigated by increasing the current in the active winding to compensate. The advantage of half stepping is that the drive electronics need not change to support it.
Microstepping
What is commonly referred to as microstepping is actually "sine cosine microstepping" in which the winding current approximates a sinusoidal AC waveform. Sine cosine microstepping is the most common form, but other waveforms are used [1]. Regardless of the waveform used, as the microsteps become smaller, motor operation becomes more smooth, thereby greatly reducing resonance in any parts the motor may be connected to, as well as the motor itself. Resolution will be limited by the mechanical stiction, backlash, and other sources of error between the motor and the end device. Gear reducers may be used to increase resolution of positioning.
Step size repeatability is an important step motor feature and a fundamental reason for their use in positioning.
Example: many modern hybrid step motors are rated such that the travel of every full step (example 1.8 Degrees per full step or 200 full steps per revolution) will be within 3% or 5% of the travel of every other full step; as long as the motor is operated within its specified operating ranges. Several manufacturers show that their motors can easily maintain the 3% or 5% equality of step travel size as step size is reduced from full stepping down to 1/10th stepping. Then, as the microstepping divisor number grows, step size repeatability degrades. At large step size reductions it is possible to issue many microstep commands before any motion occurs at all and then the motion can be a "jump" to a new position.
Theory
A step motor can be viewed as a synchronous AC motor with the number of poles (on both rotor and stator) increased, taking care that they have no common denominator. Additionally, soft magnetic material with many teeth on the rotor and stator cheaply multiplies the number of poles (reluctance motor). Modern steppers are of hybrid design, having both permanent magnets and soft iron cores.
To achieve full rated torque, the coils in a stepper motor must reach their full rated current during each step. Winding inductance and reverse EMF generated by a moving rotor tend to resist changes in drive current, so that as the motor speeds up, less and less time is spent at full current — thus reducing motor torque. As speeds further increase, the current will not reach the rated value, and eventually the motor will cease to produce torque.
Pull-in torque
This is the measure of the torque produced by a stepper motor when it is operated without an acceleration state. At low speeds the stepper motor can synchronise itself with an applied step frequency, and this pull-in torque must overcome friction and inertia. It is important to make sure that the load on the motor is frictional rather than inertial as the friction reduces any unwanted oscillations.
Pull-out torque
The stepper motor pull-out torque is measured by accelerating the motor to the desired speed and then increasing the torque loading until the motor stalls or misses steps. This measurement is taken across a wide range of speeds and the results are used to generate the stepper motor's dynamic performance curve. As noted below this curve is affected by drive voltage, drive current and current switching techniques. A designer may include a safety factor between the rated torque and the estimated full load torque required for the application.
Detent torque
Synchronous electric motors using permanent magnets have a remnant position holding torque (called detent torque or cogging, and sometimes included in the specifications) when not driven electrically. Soft iron reluctance cores do not exhibit this behavior.
Stepper motor ratings and specifications
Stepper motors nameplates typically give only the winding current and occasionally the voltage and winding resistance. The rated voltage will produce the rated winding current at DC: but this is mostly a meaningless rating, as all modern drivers are current limiting and the drive voltages greatly exceed the motor rated voltage.
A stepper's low speed torque will vary directly with current. How quickly the torque falls off at faster speeds depends on the winding inductance and the drive circuitry it is attached to, especially the driving voltage.
Steppers should be sized according to published torque curve, which is specified by the manufacturer at particular drive voltages or using their own drive circuitry.
Applications
Computer-controlled stepper motors are one of the most versatile forms of positioning systems. They are typically digitally controlled as part of an open loop system, and are simpler and more rugged than closed loop servo systems.
Industrial applications are in high speed pick and place equipment and multi-axis machine CNC machines often directly driving lead screws or ballscrews. In the field of lasers and optics they are frequently used in precision positioning equipment such as linear actuators, linear stages, rotation stages, goniometers, and mirror mounts. Other uses are in packaging machinery, and positioning of valve pilot stages for fluid control systems.
Commercially, stepper motors are used in floppy disk drives, flatbed scanners, computer printers, plotters, slot machines, and many more devices.
Friday, December 17, 2010
Stepper motor
Subscribe to:
Post Comments (Atom)
No comments:
Post a Comment